1. launch文件格式 我们知道ROS1个launch文件是xml格式的,ROS2在前面的文章中我们都是使用python格式实现的,事实上ROS2也是支持xml格式的,而...
IP属地:浙江
1. launch文件格式 我们知道ROS1个launch文件是xml格式的,ROS2在前面的文章中我们都是使用python格式实现的,事实上ROS2也是支持xml格式的,而...

PLL(Phase Locked Loop)锁相环,用来统一整合时脉讯号,使高频器件正常工作,如内存的存取资料等。PLL用于振荡器中的反馈技术。许多电子设备要正常工作,通常需...
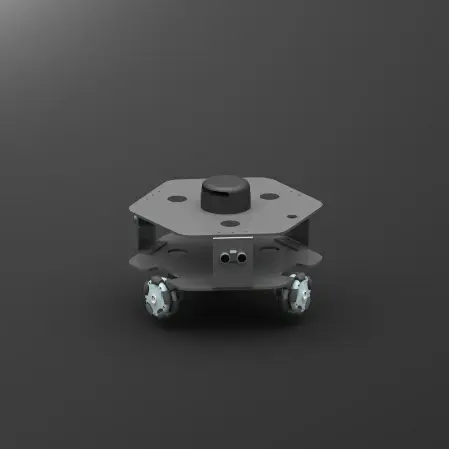
前文ROS机器人底盘(3)-通讯协议说明了PIBOT机器人小车使用的通讯协议的定义,本文介绍下如何添加新的命令协议通过一个字节的msg id区分消息类型,其中各个消息大概可以...

1. 环境 硬件环境:树莓派4B 4G 32G sandisk tf card 软件环境: 2. 编译Pangolin 3. 编译orb-slam2 3.1 修改头文件 in...
1. 概述 ROS机器人底盘(21)-关于运动控制方向的补充[https://www.jianshu.com/p/48de97f3f527]基于之前的版本,通过修改程序中的宏...

远程视频监控系统采用树莓派作为智能终端,通过CSI摄像头获取当前老年公寓内环境的视频信息,树莓派的得到视频信息后,通过支持树莓派的mjpg-strmera开源软件[17],将...